Unité de commande
Vue d'ensemble
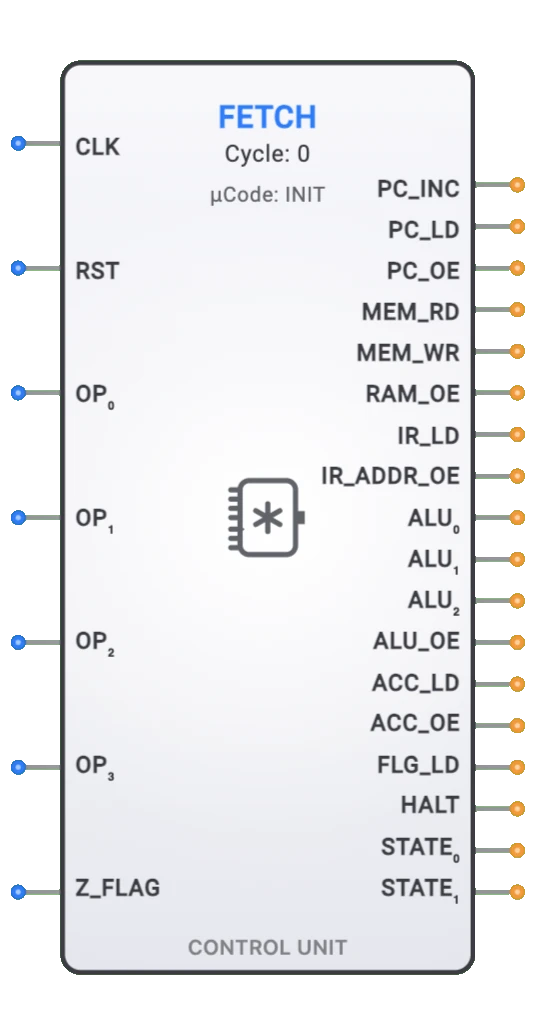
- Objectif : l'unité de commande est le composant orchestrateur de l'architecture d'ordinateur 8 bits de DigiSim. Elle génère les signaux de contrôle nécessaires pour coordonner le compteur de programme, la mémoire (RAM), le registre d'instruction, l'ALU, le registre des indicateurs et d'autres composants afin d'exécuter un jeu d'instructions complet.
- Symbole : l'unité de commande est représentée par un bloc rectangulaire avec plusieurs broches d'entrée et de sortie pour s'interfacer avec les divers composants du CPU.
- Rôle dans DigiSim.io : l'unité de commande permet la création d'un ordinateur 8 bits complet et fonctionnel en séquençant et contrôlant correctement tous les composants du système à travers un cycle lecture-décodage-exécution-écriture.
Description fonctionnelle
Fonctionnement de la machine à états
L'unité de commande fonctionne comme une machine à états finis à 4 états qui parcourt :
- FETCH : récupère l'instruction suivante depuis la mémoire
- DECODE : décode l'instruction et incrémente le compteur de programme
- EXECUTE : effectue l'opération spécifiée par l'instruction
- STORE : stocke les résultats et met à jour les indicateurs si nécessaire
Entrées et sorties
Entrées (7 broches) :
| Broche | Nom de broche | Type | Description |
|---|---|---|---|
| 0 | CLK | Entrée | Horloge système pour le fonctionnement synchrone |
| 1 | RST | Entrée | Signal de réinitialisation pour initialiser l'unité de commande |
| 2 | OP0 | Entrée | Bit 0 du code opération depuis le registre d'instruction |
| 3 | OP1 | Entrée | Bit 1 du code opération depuis le registre d'instruction |
| 4 | OP2 | Entrée | Bit 2 du code opération depuis le registre d'instruction |
| 5 | OP3 | Entrée | Bit 3 du code opération depuis le registre d'instruction |
| 6 | Z_FLAG | Entrée | Indicateur Zéro depuis le registre des indicateurs pour les sauts conditionnels |
Sorties (18 broches) :
| Broche | Nom de broche | Type | Description |
|---|---|---|---|
| 0 | PC_INC | Sortie | Incrémenter le compteur de programme |
| 1 | PC_LD | Sortie | Charger le compteur de programme (pour les sauts) |
| 2 | PC_OE | Sortie | Autorisation de sortie du compteur de programme (vers le bus d'adresses) |
| 3 | MEM_RD | Sortie | Autorisation de lecture mémoire |
| 4 | MEM_WR | Sortie | Autorisation d'écriture mémoire |
| 5 | RAM_OE | Sortie | Autorisation de sortie de la RAM (vers le bus de données) |
| 6 | IR_LD | Sortie | Chargement du registre d'instruction |
| 7 | IR_ADDR_OE | Sortie | Autorisation de sortie d'adresse de l'IR (vers le bus d'adresses) |
| 8 | ALU_OP0 | Sortie | Bit 0 du code opération de l'ALU |
| 9 | ALU_OP1 | Sortie | Bit 1 du code opération de l'ALU |
| 10 | ALU_OP2 | Sortie | Bit 2 du code opération de l'ALU |
| 11 | ALU_OE | Sortie | Autorisation de sortie de l'ALU (vers le bus de données) |
| 12 | ACC_LD | Sortie | Chargement de l'accumulateur |
| 13 | ACC_OE | Sortie | Autorisation de sortie de l'accumulateur (vers le bus de données) |
| 14 | FLG_LD | Sortie | Chargement du registre des indicateurs |
| 15 | HALT | Sortie | Indicateur d'arrêt système |
| 16 | STATE0 | Sortie | Bit 0 d'état (LSB de l'encodage d'état 2 bits) |
| 17 | STATE1 | Sortie | Bit 1 d'état (MSB de l'encodage d'état 2 bits) |
Encodage d'état (STATE1:STATE0) :
00→ FETCH01→ DECODE10→ EXECUTE11→ STORE
Architecture du jeu d'instructions
L'unité de commande prend en charge un jeu de 16 instructions avec des opcodes de 4 bits :
| Opcode | Hex | Mnémonique | Description | Opération |
|---|---|---|---|---|
| 0000 | 0x0 | NOP | Pas d'opération | PC ← PC + 1 |
| 0001 | 0x1 | LDA addr | Charger l'accumulateur | ACC ← M[addr] |
| 0010 | 0x2 | STA addr | Stocker l'accumulateur | M[addr] ← ACC |
| 0011 | 0x3 | ADD addr | Ajouter à l'accumulateur | ACC ← ACC + M[addr] |
| 0100 | 0x4 | SUB addr | Soustraire de l'accumulateur | ACC ← ACC - M[addr] |
| 0101 | 0x5 | AND addr | ET logique | ACC ← ACC & M[addr] |
| 0110 | 0x6 | OR addr | OU logique | ACC ← ACC | M[addr] |
| 0111 | 0x7 | XOR addr | OU exclusif logique | ACC ← ACC ^ M[addr] |
| 1000 | 0x8 | NOT | NON logique | ACC ← ~ACC |
| 1001 | 0x9 | SHL | Décalage à gauche | ACC ← ACC << 1 |
| 1010 | 0xA | SHR | Décalage à droite | ACC ← ACC >> 1 |
| 1011 | 0xB | JMP addr | Saut inconditionnel | PC ← addr |
| 1100 | 0xC | JZ addr | Saut si zéro | if (Z=1) PC ← addr |
| 1101 | 0xD | JNZ addr | Saut si non zéro | if (Z=0) PC ← addr |
| 1110 | 0xE | LDI | Chargement immédiat | Réservé pour usage futur |
| 1111 | 0xF | HLT | Arrêt | Arrêter l'exécution |
Format d'instruction
| Position du bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| Champ | OPCODE (4 bits) | OPÉRANDE (4 bits) | ||||||
| Description | Opération à effectuer | Adresse mémoire/Valeur |
Architecture du microcode
Génération des signaux de contrôle
L'unité de commande utilise une approche par ROM de microcode où chaque instruction est décomposée en micro-opérations à travers les quatre états. Chaque combinaison d'opcode et d'état produit un ensemble spécifique de signaux de contrôle.
Exemple : instruction LDA (Load Accumulator)
État FETCH :
- PC_OE = 1 (le PC pilote le bus d'adresses)
- MEM_RD = 1 (lecture de l'instruction depuis la mémoire)
- IR_LD = 1 (chargement de l'instruction dans l'IR)
État DECODE :
- PC_INC = 1 (incrémenter le PC vers l'instruction suivante)
État EXECUTE :
- IR_ADDR_OE = 1 (l'adresse de l'IR pilote le bus d'adresses)
- MEM_RD = 1 (lecture des données depuis l'adresse mémoire)
État STORE :
- RAM_OE = 1 (la RAM pilote le bus de données)
- ACC_LD = 1 (chargement des données dans l'accumulateur)
- FLG_LD = 1 (mise à jour des indicateurs)
Contrôle de bus et gestion des trois états
L'unité de commande gère soigneusement le conflit de bus en s'assurant qu'un seul composant pilote chaque bus à un moment donné :
- Bus d'adresses : contrôlé par PC_OE ou IR_ADDR_OE
- Bus de données : contrôlé par RAM_OE, ALU_OE ou ACC_OE
Intégration avec d'autres composants
Compatibilité des composants
L'unité de commande est conçue pour fonctionner de manière transparente avec les composants existants de DigiSim :
- ALU 8 bits : reçoit les codes d'opération (ALU_OP0-2) et fournit les résultats avec les indicateurs
- Compteur de programme : contrôlé via les signaux PC_INC, PC_LD et PC_OE
- RAM (256×8) : géré via les signaux MEM_RD, MEM_WR et RAM_OE
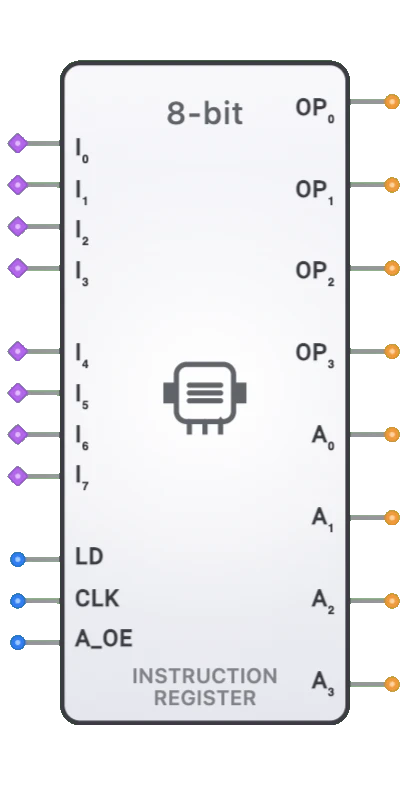
- Registre d'instruction : chargé via IR_LD et fournit la séparation opcode/adresse
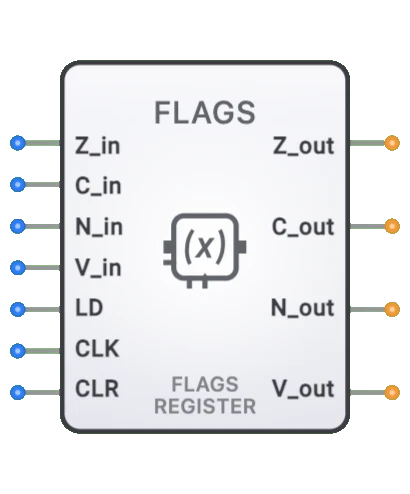
- Registre des indicateurs : mis à jour via FLG_LD et lu pour les sauts conditionnels (Z_FLAG)
- Accumulateur : contrôlé via les signaux ACC_LD et ACC_OE
Calage des signaux
L'unité de commande assure des temps de mise en place et de maintien corrects pour tous les composants :
- Mise en place de l'adresse : les signaux d'adresse sont stables avant les opérations mémoire
- Données valides : les données sont valides lorsque les signaux de chargement sont actifs
- Synchronisation d'horloge : tous les changements d'état se produisent sur les fronts montants d'horloge
- Comportement de réinitialisation : réinitialisation asynchrone immédiate vers un état connu
Exemples d'utilisation
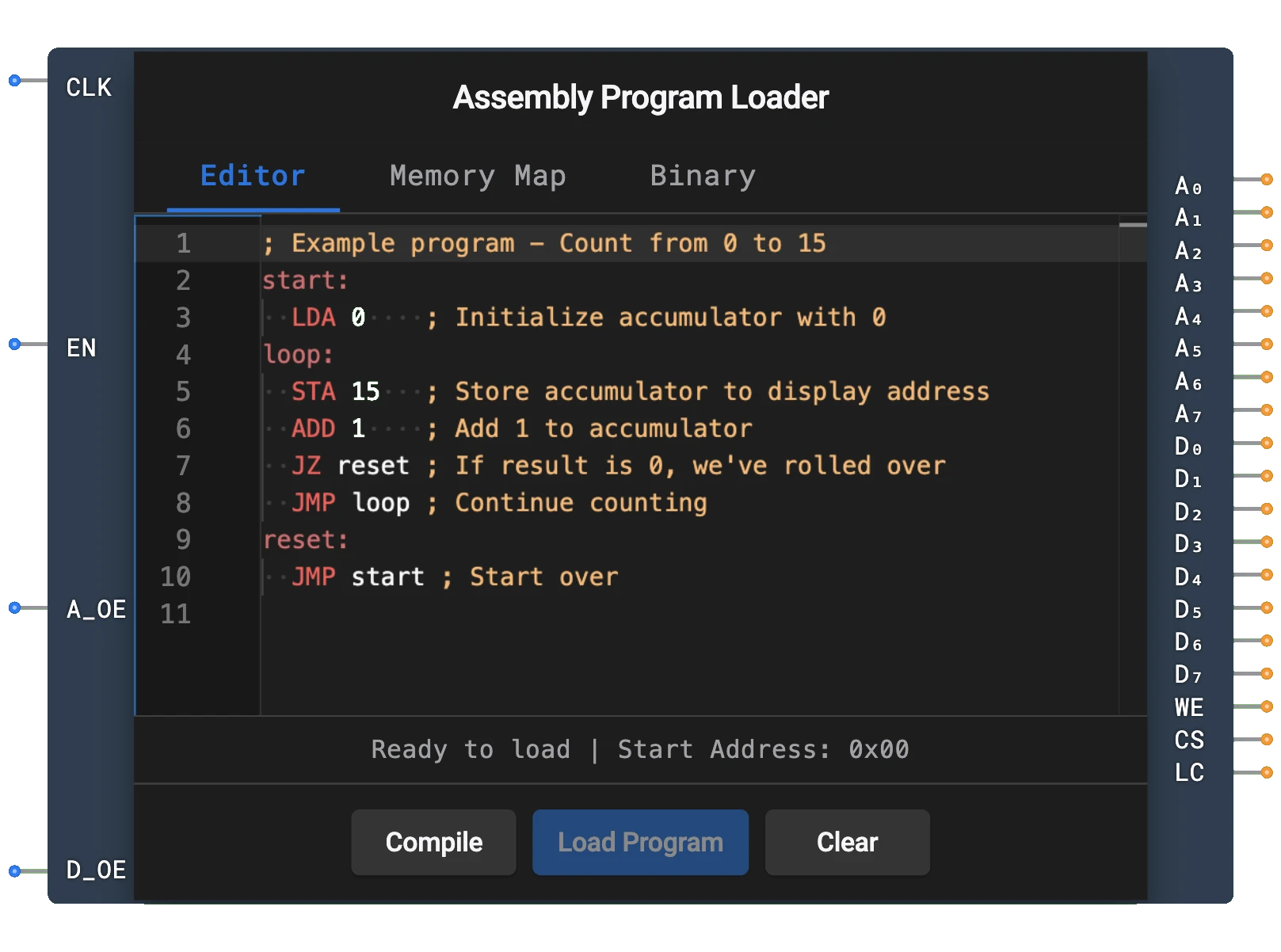
Programme simple : additionner deux nombres
; Add two numbers stored in memory
0x0: LDA 0x8 ; Load first number from address 0x8
0x1: ADD 0x9 ; Add second number from address 0x9
0x2: STA 0xA ; Store result at address 0xA
0x3: HLT ; Halt execution
...
0x8: 0x05 ; First number (5)
0x9: 0x03 ; Second number (3)
0xA: 0x00 ; Result location
Exemple de boucle : compter de 1 à 10
; Count from 0 to 10
0x0: LDA 0x8 ; Load counter
0x1: ADD 0x9 ; Add 1
0x2: STA 0x8 ; Store counter
0x3: SUB 0xA ; Subtract 10
0x4: JNZ 0x0 ; Jump back if not zero
0x5: HLT ; Halt when done
...
0x8: 0x00 ; Counter
0x9: 0x01 ; Constant 1
0xA: 0x0A ; Constant 10
Notes techniques
Exigences d'horloge
- Fréquence minimale : 1 Hz pour l'observation pédagogique
- Fréquence maximale : limitée par les délais de propagation des composants
- Rapport cyclique : 50 % recommandé pour des marges de calage optimales
Comportement de réinitialisation
- Réinitialisation asynchrone : positionne immédiatement l'état à FETCH
- Effacement des signaux : tous les signaux de contrôle sont réinitialisés à l'état inactif
- Récupération après arrêt : nécessite une réinitialisation pour reprendre l'exécution
Performance
- Toutes les instructions : 4 cycles d'horloge (lecture-décodage-exécution-écriture)
- Instructions par seconde : fréquence d'horloge ÷ 4
- Bande passante mémoire : une lecture ou écriture par cycle d'instruction