8ビットデータバス
概要
- 用途: 8ビットデータバスは、CPUアーキテクチャにおける共有データ経路を表す視覚的かつ機能的なコンポーネントです。複数のトライステート入力(バス入力)を受け取り、解決されたバス値を出力します。バスアーキテクチャの理解とバス競合問題のデバッグに役立ちます。
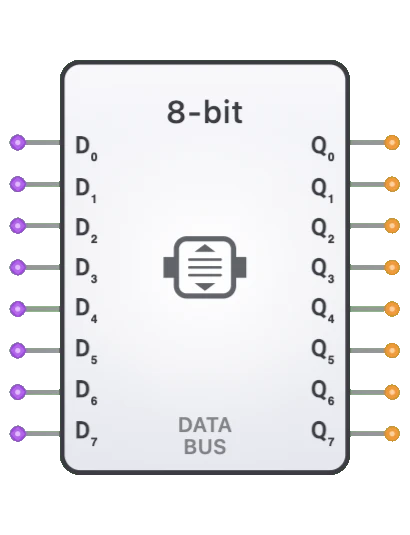
- シンボル: データバスは、8ビットの入出力バスを持つ細長い矩形ブロックとして表現され、内部にデータフローパスを示す線が描かれています。
- DigiSim.ioでの役割: CPU設計におけるバス接続を視覚的に表現し、データフローの理解やバス競合・フローティング入力などの問題のデバッグを容易にします。
機能説明
論理動作
8ビットデータバスは、主に複数の入力(バス入力として構成)を受け取り、解決された値を出力するパススルーコンポーネントです。実際のトライステート調停はDigiSimのイベント駆動シミュレータが処理します:
- ドライバが1つだけアクティブな場合、出力はそのドライバの値を反映します。
- ドライバがアクティブでない場合(すべてハイインピーダンス)、出力はハイインピーダンスになります。
- 複数のドライバが競合する値でアクティブな場合、バス競合が検出されログに記録されます。
機能表:
| アクティブドライバ数 | ドライバ値 | Q0-Q7 出力 | ステータス |
|---|---|---|---|
| 0 | すべてHigh-Z | High-Z | ドライバなし |
| 1 | 値 V | V | 正常 |
| 2以上(同値) | すべて同じ | V | 警告 |
| 2以上(競合) | 異なる | 未定義 | 競合! |
注: バス競合はシミュレータによってログに記録され、設計エラーを示す場合があります
入力と出力
入力:
- D0-D7[7:0]: バス入力として構成された8ビットデータ入力。複数のトライステートソースが各ピンに接続可能で、シミュレータが実際の値を解決します。
出力:
- Q0-Q7[7:0]: 解決されたバス値を反映する8ビットデータ出力。対応するすべての入力がハイインピーダンスの場合、出力もハイインピーダンスになります。
ピンレイアウト
入力ピン(左側):
- ピン 0-7: D0-D7(バス入力 - 複数のトライステート接続を受け付け)
出力ピン(右側):
- ピン 0-7: Q0-Q7(解決されたバス値出力)
設定可能なパラメータ
- 競合検出: バス競合の自動検出とログ記録。
- 伝搬遅延: 信号パススルーの最小遅延。
DigiSim.ioでの視覚的表現
8ビットデータバスは矩形ブロック(112x160ピクセル)として表示されます:
- 左側に8つの入力ピン(D0-D7)、バス入力として表示
- 右側に8つの出力ピン(Q0-Q7)
- データフローを示す内部の水平線
- 中央に「DATA BUS」と「8-BIT」のラベル
太いバス入力ピンは、複数のトライステートソースが接続可能であることを示し、通常の単一ソース入力と区別されます。
教育的価値
主要概念
- バスアーキテクチャ: 複数のコンポーネントが共通のデータ経路を共有する仕組みを実演します。
- トライステート論理: トライステート出力がマルチプレクサなしでバス共有を可能にする方法を示します。
- バス競合: 複数のドライバがアクティブな場合に発生する潜在的な競合を説明します。
- データフロー可視化: 抽象的なバスの概念を具体的で目に見えるものにします。
- モジュール設計: CPUコンポーネントをバスを介して通信する個別のモジュールとして考える思考を促進します。
学習目標
- データバスがCPU内のコンポーネント間通信をどのように可能にするかを理解する。
- バス調停と制御信号の重要性を学ぶ。
- バス競合を一般的な設計エラーとして認識し、その回避方法を理解する。
- モジュール式デジタルシステムの設計にバスアーキテクチャの概念を適用する。
- バスベースの設計におけるトライステートバッファの役割を理解する。
使用例/シナリオ
- CPUデータパス: ALU、レジスタ、メモリを接続する中央データバス。
- メモリデータインターフェース: CPUとRAM/ROM間の双方向データフロー。
- レジスタファイル: 複数のレジスタの読み書きのための共通バス。
- I/Oインターフェース: CPUと周辺デバイス間のデータ交換。
- デバッグと可視化: トラブルシューティングのためにバス信号を可視化する。
8ビットコンピュータへの統合
DigiSim 8ビットコンピュータアーキテクチャにおいて、データバスはすべての主要コンポーネントを接続します:
┌──────────────────────────────────────────────────────────────────┐
│ 8-BIT DATA BUS │
│ │
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ ┌─────────┐ ┌────────┐ │
│ │ ACC │ │ ALU │ │ RAM │ │ ROM │ │ IR │ │
│ │ │ │ │ │ │ │ │ │ │ │
│ └────┬────┘ └────┬────┘ └────┬────┘ └────┬────┘ └───┬────┘ │
│ │ │ │ │ │ │
│ ▼ ▼ ▼ ▼ ▼ │
│ ┌────────┐ ┌────────┐ ┌────────┐ ┌────────┐ ┌────────┐ │
│ │TRI-BUF │ │TRI-BUF │ │TRI-BUF │ │TRI-BUF │ │TRI-BUF │ │
│ │(ACC_OE)│ │(ALU_OE)│ │(RAM_OE)│ │(ROM_OE)│ │(IR_OE) │ │
│ └────┬────┘ └────┬────┘ └────┬────┘ └────┬────┘ └───┬────┘ │
│ │ │ │ │ │ │
│ └────────────┴────────────┴─────┬──────┴───────────┘ │
│ │ │
│ ┌────────▼────────┐ │
│ │ DATA BUS │ │
│ │ 8-BIT │ │
│ └────────┬────────┘ │
│ │ │
│ ┌───────────────────────────────┼───────────────────┐ │
│ ▼ ▼ ▼ │
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ │
│ │ ACC │ │ RAM │ │ MAR │ │
│ │ (IN) │ │ (DIN) │ │ (DIN) │ │
│ └─────────┘ └─────────┘ └─────────┘ │
│ │
└──────────────────────────────────────────────────────────────────┘
制御信号の協調
制御ユニットは、常に1つのドライバのみがアクティブであることを保証します:
| マイクロコードステップ | アクティブドライバ | 制御信号 |
|---|---|---|
| 命令フェッチ | ROM | ROM_OE = 1 |
| RAMからのロード | RAM | RAM_OE = 1 |
| ALU結果 | ALU | ALU_OE = 1 |
| ACC出力 | アキュムレータ | ACC_OE = 1 |
| 即値ロード | IR(オペランド) | IR_OE = 1 |
技術ノート
- データバスコンポーネントは主に視覚的なものであり、実際のバス調停はシミュレータが処理します。
- バス入力はコンポーネント構成で
isBusInput: trueとマークされています。 - シミュレータの
resolveBusContention関数が複数ドライバのシナリオを処理します。 - バスの各ビットは独立して解決されます。
- ハイインピーダンス(フローティング)入力はハイインピーダンス出力として伝搬します。
- 競合検出は、複数のドライバが重複するタイミング問題の特定に役立ちます。
- 物理回路では、バス競合は過大電流と潜在的な損傷を引き起こす可能性があります。
バス問題のデバッグ
よくある問題
- すべての出力がHigh-Z: ドライバが有効になっていません。出力イネーブル信号を確認してください。
- 予期しない値: 間違ったドライバが有効になっています。制御信号のタイミングを確認してください。
- 競合警告: 複数のドライバがアクティブです。制御ロジックの相互排他を確認してください。
- 断続的なエラー: タイミング問題です。イネーブル信号の適切な順序付けを確認してください。
デバッグのヒント
- オシロスコープを使用して出力イネーブル信号を観察してください。
- 各クロックフェーズ中にOE信号が1つだけアクティブであることを確認してください。
- OE信号がクロックと適切に同期していることを確認してください。
- データバスコンポーネントの視覚的な状態を使用して、アクティブ/非アクティブの状態を確認してください。
関連コンポーネント
- アキュムレータ: 算術演算のためにデータバスに接続します。
- ALU(8ビット): 演算結果をデータバスに提供します。
- RAM: バスを介してデータを読み書きします。
- ROM: 命令データをバスに提供します。
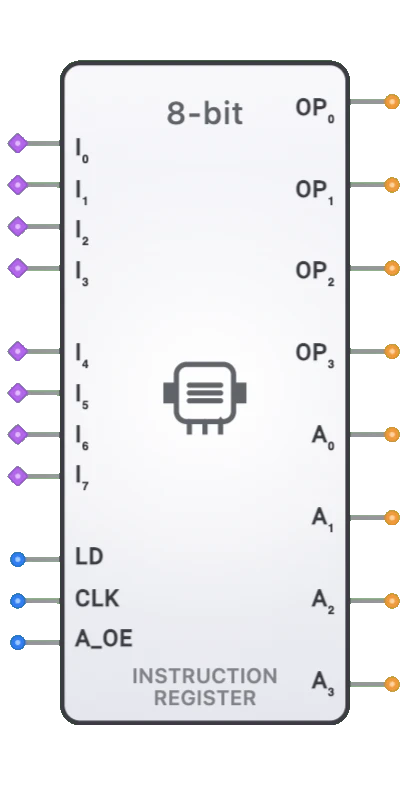
- 命令レジスタ(IR): バスから命令を受け取り、オペランドを出力します。
- メモリアドレスレジスタ(MAR): データバスからアドレスを受け取る場合があります。
- トライステートバッファ(8ビット): コンポーネントの出力をバスにゲートします。
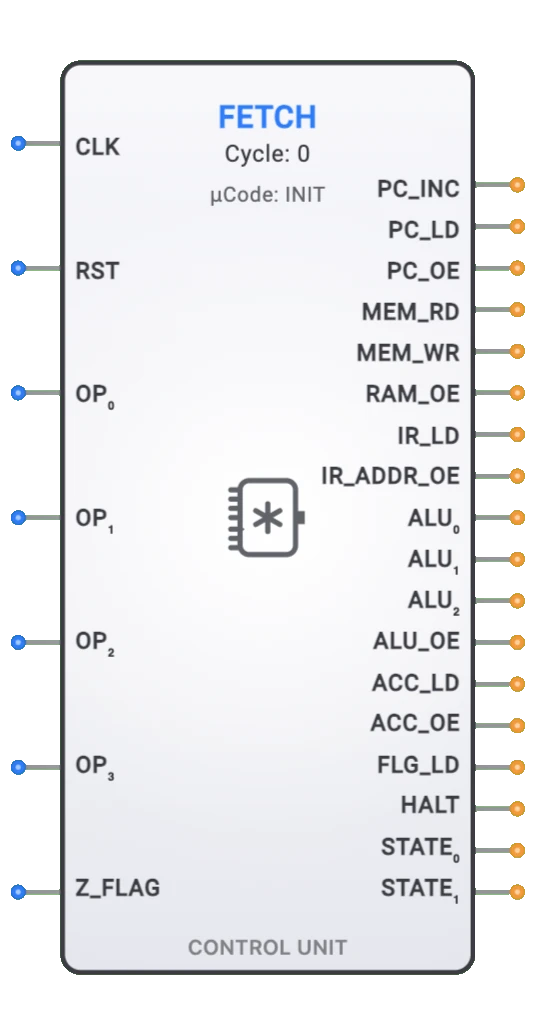
- 制御ユニット: どのコンポーネントがバスを駆動するかを調整します。